Configure & Build u-boot 2019.04 source code
- Download u-boot source code
$ cd ~/KM_GITHUB/
$ git clone https://github.com/kernelmasters/beagleboneblack-uboot.git $ cd beagleboneblack-uboot
- Configure u-boot source code for KM-BBB and build using the below scirpt. It takes 3 to 5 minutes.
$ km-bbb-uboot-build.sh
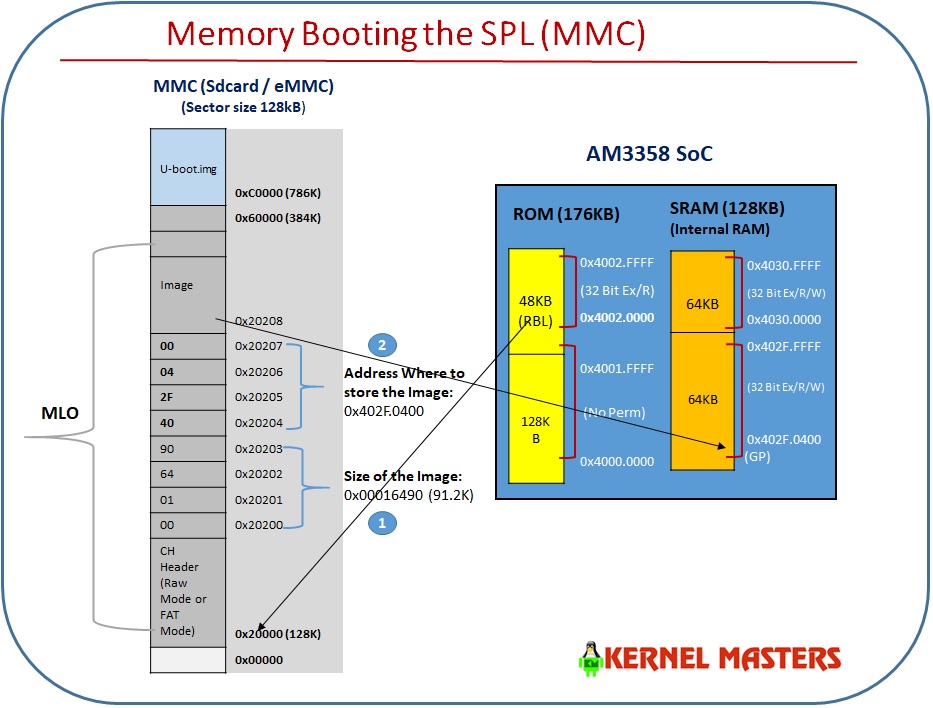
- After succesfully build u-boot source code and current folder X-loader image “MLO” and “u-boot.img” generated.
u-boot.bin: is the binary compiled U-Boot bootloader.
u-boot.img: contains u-boot.bin along with an additional header to be used by the boot ROM to determine how and where to load and execute U-Boot.
Install u-boot 2019.04 source code
Using Sd card
Install MLO and u-boot.img images in to sdcard using the below script.
$ ./km-bbb-uboot-install.sh --mmc /dev/sdX
where ‘X’ indicates sd card device name. find out using dmesg command after inserting sd card.
Using Network (TFTP)
$ ./km-bbb-uboot-install.sh --board X
Where ‘x’ indicates KM-BBB board number.
Configure & Build Kernel 4.19.94 source code
- Download kernel source code from github
$ cd ~/KM_GITHUB/
$ git clone git@github.com:kernel-masters/beagleboneblack-kernel.git
$ cd beagleboneblack-kernel
- Configure kernel source code for KM-BBB and build using the below scirpt. It takes 3 to 5 minutes.
$ km-bbb-kernel-build.sh
- After succesfully build kernel source code and current folder vmlinux image generated.
Install kernel source code
Using Sd card
Install vmlinuz, dtbs, modules images in to sdcard using the below script.
$ ./km-bbb-kernel-install.sh --mmc /dev/sdX
where ‘X’ indicates sd card device name. find out using dmesg command after inserting sd card.
Using Network (TFTP)
$ ./km-bbb-kernel-install.sh --board X
Where ‘x’ indicates KM-BBB board number.





 Admission for 6 months Embedded AI & IoT offline course at Hyderabad & Bangalore
Admission for 6 months Embedded AI & IoT offline course at Hyderabad & Bangalore